



本网讯 (机器人学院/具身智能研究院)近日,国际电气与电子工程师协会旗舰期刊《Proceedings of the IEEE》正式发表了由安徽大学牵头完成的研究成果——“Toward Safety-First Human-Like Decision Making for Autonomous Vehicles in Time-Varying Traffic Flow”(面向时变车流的自动驾驶安全优先类人决策)。该论文由安徽大学机器人学院/具身智能研究院王晓教授(第一作者)、于鋆濡、孙长银教授(通讯作者),与江淮汽车有限公司吴琼博士、澳大利亚格里菲斯大学Ljubo Vlacic教授、澳门科技大学黄峻博士等合作完成。研究提出了安全优先的类人决策框架SF-HLDM,为自动驾驶在复杂动态交通中的社会兼容与安全高效行驶提供了全新解决方案。

X. Wang, J. Yu, J. Huang, Q. Wu, L. Vlacic and C. Sun, “Toward Safety-First Human-Like Decision Making for Autonomous Vehicles in Time-Varying Traffic Flow”, in Proceedings of the IEEE, doi: 10.1109/JPROC.2026.3679470.
突破“机械式高效”到“类人般灵活”
当前,自动驾驶汽车在时间连续、交互密集的交通流中面临严峻挑战:如何在保证绝对安全的前提下,像人类驾驶员一样灵活、主动、懂礼让地行驶?现有决策系统要么过于保守而阻碍交通效率,要么过于激进而引发安全风险,更缺乏对人类“路权意识”“礼让默契”等社会规范的深度理解。
该研究直面这一核心难题,指出人类驾驶员之所以能在复杂路况中游刃有余,关键在于其具备风险评估、社会规范遵循与多目标动态平衡的综合能力。研究首次系统性地将“路权意识”量化纳入自动驾驶决策核心,让智能汽车学会“何时该让、何时该走”的社交智慧,为解决自动驾驶与人类驾驶员共存的安全与信任问题提供了重要理论支撑。
三大创新构筑技术突破
该论文提出了分层渐进式SF-HLDM框架,实现了三大核心创新:
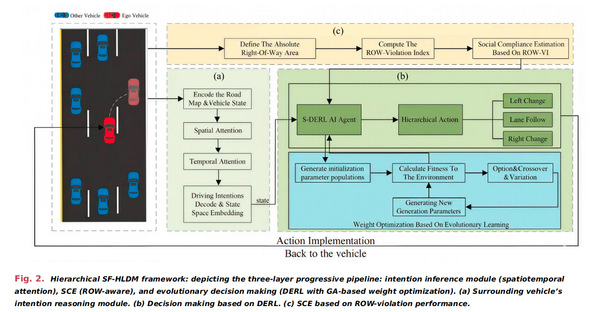
其一,设计绝对路权区域与量化社会合规性评估机制。研究定义了车辆的动态受保护区域,并通过“路权违规指数”精确量化自动驾驶车辆对社会规范的遵循程度,将隐性的人类驾驶默契转化为可计算、可优化的数学指标。
其二,融合时空注意力与深度进化强化学习。通过多特征晚期融合的空时注意力机制,模型能够像人类一样识别关键交通参与者和关键时刻,精准推断周边车辆的驾驶意图;同时构建融合遗传算法的深度强化进化学习,在降低搜索空间代价的同时有效避免陷入局部最优,在安全、效率、舒适度和社会合规四个维度上实现自适应平衡。
其三,提出层次化动作空间与混合奖励函数。将高层的变道、跟车策略与底层的转向角、加速度控制相分离,使决策既具有策略性又保持操控的连续性。多目标奖励函数涵盖车速保持、加速度平滑度、碰撞时间裕度及路权违规惩罚,全面引导车辆学习“安全第一、类人自然”的驾驶风格。
实验验证:更安全、更高效、更懂礼让
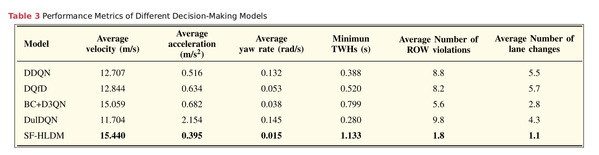
研究团队在CARLA高保真仿真平台、复杂城市地图及低、中、高三种交通密度下开展了大量对比实验。结果显示,SF-HLDM相比当前最先进方法,平均车速提升2.5%,平均加速度降低23.5%,平均偏航率降低60.5%,最小车头时距扩大41.8%——这意味着车辆在跑得更快的同时,反而保持了更大的安全距离和更平稳的操控。
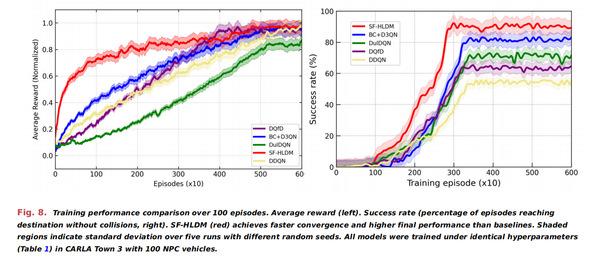
尤为亮眼的是社会合规性指标:SF-HLDM模型的平均路权违规次数仅为1.8次,较其他方法的5.6次降低67.9%,同时平均换道次数也降至最低(1.1次)。消融实验进一步证实,移除意图感知模块或进化优化模块后,模型的收敛速度、稳定性和综合性能均显著下降,凸显了各关键模块的不可或缺性。
该成果的科学价值在于首次将安全优先原则与量化社会规范深度融合,提供了类人决策的高度可解释框架;其应用价值则直接指向更安全、更高效、更易被社会接受的自动驾驶系统,尤其适用于城市密集交通、人机混行等复杂场景,有望加速自动驾驶从封闭测试场走向真实开放道路的进程。
关于《Proceedings of the IEEE》
《Proceedings of the IEEE》是IEEE(国际电气与电子工程师协会)的旗舰期刊(影响因子25.9),创刊于1913年,拥有超过百年的悠久历史。该期刊以发表高影响力综述、重大前沿进展及开创性研究成果而著称,最新影响因子位居电气电子工程领域前列,是全球学术界和工业界公认的顶级学术期刊。本次安徽大学团队在该刊发表论文,不仅彰显了其在自动驾驶类人决策领域的国际领先水平,也标志着具身智驾研究方向取得了又一里程碑式成果。
该研究得到国家自然科学基金、安徽省高校杰出青年、安徽江淮汽车集团股份有限公司等项目的资助。论文全文已在IEEE Xplore数据库在线发布。